- 本篇文档对鲁棒性的定义:$$goodPoints/allPoints$$ 其中
- goodPoints:跟踪成功的特征点。即,向前-向后追踪回到开始帧,EPE 小于设定的阈值(单位: pixel)。
- allPoints:所有特征点
- 使用全部特征点测试鲁棒性,$$Harris \gtrsim Tomasi > Fast$$
- 使用我们的均匀化策略后的特征点测试鲁棒性,$$Fast > Tomasi \approx Harris$$
光流评估指标
误差指标
EPE(Endpoint Error):估计光流和 ground-truth 光流的欧氏距离
$$EPE = \sqrt{(u_{est} - u_{gt})^2 + (v_{est} - v_{gt})^2}$$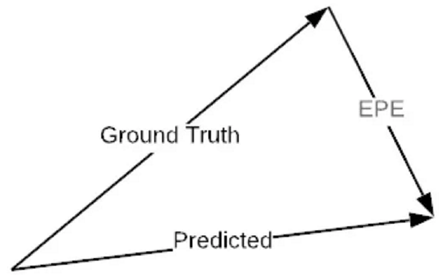
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17std::vector<float> EndPointError(const std::vector<cv::Point2f>& prevPoints, const std::vector<cv::Point2f>& nextPoints, std::vector<uchar> status)
{
std::vector<float> endPointError;
for (int i = 0; i < prevPoints.size(); i++)
{
const cv::Point2f prevP = prevPoints[i];
const cv::Point2f nextP = nextPoints[i];
float distance = 100.0;
if ((bool)status[i])
{
const cv::Point2f diff = nextP - prevP;
distance = sqrt((float)diff.ddot(diff));
}
endPointError.push_back(distance);
}
return endPointError;
}AE(Angular Error):光流向量之间的角度误差。计算角度误差时增加一维,使用的是三维向量 (u, v, 1)
$$\mathrm{AE}=\arccos \left(\frac{\left(\mathrm{u}{\mathrm{est}}, \mathrm{v}{\text {est }}, 1\right)^{\mathrm{T}} *\left(\mathrm{u}{\mathrm{gt}}, \mathrm{v}{\mathrm{gt}}, 1\right)}{\left.\sqrt{1.0+\mathrm{u}{\mathrm{est}} * \mathrm{u}{\mathrm{est}}+\mathrm{v}{\mathrm{est}} * \mathrm{v}{\mathrm{est}}} \sqrt{1.0+\mathrm{u}{\mathrm{gt}} * \mathrm{u}{\mathrm{gt}}+\mathrm{v}{\mathrm{gt}} * \mathrm{v}{\mathrm{gt}}}\right)}\right)$$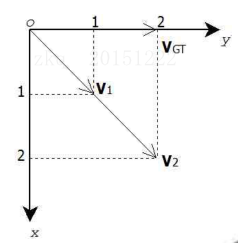
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22std::vector<float> AngularError(const std::vector<cv::Point2f>& prevPoints, const std::vector<cv::Point2f>& nextPoints, std::vector<uchar> status)
{
std::vector<float> angularErrs;
for (int i = 0; i < prevPoints.size(); i++)
{
const cv::Point2f prevPoint2d = prevPoints[i];
const cv::Point2f nextPoint2d = nextPoints[i];
const cv::Point3f prevPoint3d(prevPoint2d.x, prevPoint2d.y, 1);
const cv::Point3f nextPoint3d(nextPoint2d.x, nextPoint2d.y, 1);
double angularErr = 100.0;
if ((bool)status[i])
{
double vecDocVec = prevPoint3d.ddot(nextPoint3d);
double vecNormProvecNorm = norm(prevPoint3d) * norm(nextPoint3d);
double mid = vecDocVec / vecNormProvecNorm;
double AE = acos(mid);
angularErr = acos((double)(prevPoint3d.ddot(nextPoint3d) / norm(prevPoint3d) * norm(nextPoint3d)));
}
angularErrs.push_back(angularErr);
}
return angularErrs;
}
统计指标
- AEE:平均点误差
- AAE:平均角误差
Datasets
MPI Sintel
从人工生成的动画 sintel 中得到光流 ground truth,每一个版本都包含 1041 个可用来训练的图片对,提供的 ground truth 十分密集,大幅度、小幅度的运动都包含。
sintel 数据集包括两种版本:
- sintel final:包括运动模糊和一些环境氛围特效,如雾等
- sintel clean:没有 final 的特效
Crowd-Flow
- 序列包含 371 到 1451 个独立运动的个体
- 数据集由 10 个长度范围的序列组成,在 300 至 450 帧之间,所有序列均以 25hz 的帧速率和高清分辨率呈现
- 与此前光流数据集相比,该数据集除了提高了分辨率和帧的数量之外,还以连续序列而不是单帧对进行组织,允许评估时间一致性,例如以轨迹的形式
KITTI
只有一种特殊的动作类型(类似行车记录仪),并且位移很大,视频使用一个摄像头,ground-truth 由 3D 激光雷达得出,远距离的物体,如天空没法被捕捉,导致该数据集光流 ground-truth 比较稀疏。
- KITTI 2012:194 组图片
- KITTI 2015:200 组图片
Flying Chairs
软件渲染生成的虚拟数据,包含了 22872 对图像。
SceneFlow
利用软件渲染生成的虚拟立体数据集,包含 35454 个训练图像(有 ground truth),所有的图片分辨率都是 960x540。
主要包含三个子集:
- FlyingThings3D
- Driving
- Monkaa
Middlebury
- 评估使用 1.1 中的 4 个指标
- gray 和 color 都有
- 位移很小,通常小于10个像素
- 12 个场景的图片流,每个场景图片只有 10 张
- 针对的是全图片的光流,ground-truth 只有 1 帧的。需要把跑出来的光流结果保存成指定的数据格式(.flo),上传到指定地址
数据集生成工具
不依赖数据集评估方案
forward-backward
使用基于奇偶数的 forward-backward:如有 5 幅图像。前向时为 0-2-4,后向时为 4-3-1-0,连起来为 0-2-4-3-1-0。
最后使用欧氏距离计算出 0 帧与最后的 0 帧图像之间,特征点位置的漂移 e,即 final drift。设定一个阈值 threshold,计算小于 thresh 的特征点的百分比,为鲁棒性;e 的直方图用于表示稳定性。
1 | float OpticalFlowRubost(std::vector<float> endpointErr, float thresh) |
Ref.
- optical flow光流估计的评价指标_wrotcat的博客-CSDN博客
- Emgu CV / OpenCV Contrib Git clone / [4ec320] /modules/optflow/samples/optical_flow_evaluation.cpp
- 图像序列光流计算评估理论及方法研究
- 最全自动驾驶数据集分享系列四|光流数据集
- Datasets-OpenDataLab
- OPTICAL FLOW TOOLKIT
- optical flow数据集KITTI 2012 2015 sintel crowd flow_城俊BLOG的博客-CSDN博客
- 论文:Evaluation of Endoscopic Image Enhancement for Feature Tracking: A New Validation Framework
- 特征点检测和追踪评价:A New Validation Framework

